
Hướng Dẫn Cách Sửa Chữa Tay Điều Khiển Xe Lăn Điện
Nhìn bề ngoài, sử dụng một chiếc xe lăn điện làm căn cứ robot có vẻ như không có trí tuệ. Các mô-đun điều khiển cho những chiếc ghế này chứa tất cả các thiết bị điện tử cần thiết để điều khiển động cơ, bao gồm bộ chuyển đổi DC / DC, tạo ra PWM và bộ vi điều khiển để điều chỉnh tăng tốc, giảm tốc và phanh. Trước khi tôi hiểu rõ hơn, tôi đã mua một chiếc xe lăn điện với suy nghĩ rằng đó sẽ là một nhiệm vụ đơn giản để sử dụng chức năng của các thiết bị điện tử đã được tích hợp trong mô-đun điều khiển. Tuy nhiên, như bất cứ ai đã thử điều này đều biết, tài liệu có sẵn cho các mô-đun điều khiển xe lăn hầu như không tồn tại.

Do đó, tất cả các robot xe lăn được báo cáo trước đây tôi đọc về trực tuyến đều bỏ qua mô-đun điều khiển ban đầu, sử dụng các trình điều khiển động cơ PWM riêng biệt và thường vô hiệu hóa phanh điện trên động cơ. Các giải pháp này hoạt động tốt, nhưng tôi không thể ép bản thân từ bỏ mô-đun điều khiển được thiết kế tốt mà tôi có sẵn chỉ vì việc trang điểm của nó rất khó nắm bắt.
Dự án này bắt đầu khi một trong những học sinh của tôi tiếp cận tôi vào đầu mùa hè 2016 với mong muốn tạo ra một robot có thể đi lang thang xung quanh bộ phận của chúng tôi, nói chuyện với các sinh viên, chụp ảnh để đăng lên tài khoản Twitter và cuối cùng cung cấp một nền tảng robot có thể mở rộng cho sinh viên xây dựng Bởi vì robot này có thể bị hao mòn do sự tương tác thường xuyên của nó với sinh viên và giảng viên, tôi nghĩ ngay đến việc sử dụng xe lăn điện làm cơ sở.

Ghế điện tương đối rẻ tiền rất dễ tìm thấy trên eBay (nếu bạn sẵn sàng đi lấy chúng), và học sinh của tôi và tôi đã tìm thấy một chiếc với giá 130 đô la trong khoảng cách lái xe: Máy bay phản lực Pride 3, với mô-đun điều khiển Penny + Giles Pride (xem Hình 1 ). Khi chúng tôi mua pin mới (với giá 120 đô la khác), chúng tôi nghĩ rằng chúng tôi đang kinh doanh, nhưng việc chuyển đổi từ ghế sang robot khó khăn hơn một chút so với dự đoán ban đầu của chúng tôi.
Phía trên cùng của hộp chứa chỉ báo nguồn điện, nút nguồn và cần điều khiển, cùng với một số PCB (bảng mạch in) dùng để giao tiếp các thành phần này với phần còn lại của mô-đun thông qua cáp ruy băng và một bó hai Dây điện.
Việc đóng gói dày đặc của các thiết bị điện tử trong mô-đun ban đầu là áp đảo. Tuy nhiên, vì cần điều khiển là cách trực tiếp nhất để điều khiển chuyển động của ghế, nên đó có vẻ là nơi hợp lý nhất để bắt đầu điều tra của chúng tôi về hoạt động bên trong của mô-đun điều khiển. Bản thân mô-đun cần điều khiển được đặt trong một xi lanh kim loại (được hiển thị nổi bật trong Hình 2) được gắn trên đỉnh của mô-đun điều khiển. Một bó gồm năm dây màu khác nhau (đen, xanh lá cây, đỏ, vàng và xanh dương) kết nối mô-đun này với phần còn lại của thiết bị điện tử trong hộp. Mỗi trong số các dây này kết nối một cách tình cờ với một miếng hàn trên PCB chứa nút nguồn và đèn báo hiệu đèn LED. Sử dụng các miếng đệm này làm điểm tiếp xúc, chúng tôi có thể xác định mục đích của từng dây này thông qua việc sử dụng đồng hồ vạn năng kỹ thuật số (DMM).
Dự đoán ban đầu của chúng tôi (hóa ra là chính xác) là dây màu đen cung cấp kết nối nối đất cho mô-đun cần điều khiển. Vì vậy, chúng tôi đã kết nối dây dẫn đất của DMM của chúng tôi với dây màu đen và thăm dò điện áp của các dây khác đối với nút đó. Chúng tôi thấy rằng dây màu đỏ được giữ ở mức không đổi 12 V và dây màu xanh lá cây được giữ ở mức 6V không đổi so với dây màu đen. Điện áp của hai dây còn lại thay đổi tùy theo chuyển động của cần điều khiển.
Khi thanh ở trạng thái nghỉ, cả hai dây màu xanh và màu vàng được giữ ở mức 6V. Tuy nhiên, khi cần điều khiển được bật từ lùi hoàn toàn sang tiến hoàn toàn, điện áp của dây màu vàng thay đổi trơn tru từ 5V đến 7V. Tương tự, khi cần điều khiển được lắc từ trái sang phải, điện áp của dây màu xanh thay đổi trơn tru từ 5V đến 7V.
Khám phá hành vi của dây màu vàng và màu xanh là một bước đột phá trong quá trình hack xe lăn; tất cả những gì cần có để khai thác sức mạnh của chiếc ghế là mô phỏng hành vi của hai dây này. Nếu chúng ta có thể tìm ra cách để điều khiển hai điện áp tương tự này bằng cách sử dụng một nền tảng kỹ thuật số tiêu chuẩn, chúng ta biết rằng chúng ta sẽ kinh doanh
Tạo và tạo tín hiệu số điều chế độ rộng xung lọc thấp (PWM) là một kỹ thuật phổ biến để tạo tín hiệu đầu ra analog từ thiết bị kỹ thuật số và khi đầu ra analog là cần thiết từ nền tảng vi điều khiển mà không cần bộ chuyển đổi tích hợp (chuyển đổi kỹ thuật số sang tương tự) ) ngoại vi (chẳng hạn như ATmega328P ở trung tâm của Arduino Uno chẳng hạn), đây thường là lựa chọn hợp lý nhất. Tuy nhiên, mọi thứ có thể trở nên phức tạp khi các điện áp liên quan không nằm trong phạm vi 0-5V.
Ngoài ra, ngay cả sau khi lọc tín hiệu PWM bằng tụ điện, có thể có một số nhiễu tần số cao còn sót lại phát ra trên tín hiệu đầu ra tương tự. Trong trường hợp này, vì tôi biết rằng chúng tôi sẽ cần (ít nhất) cung cấp điện áp bù cho tín hiệu đầu ra PWM được lọc và tôi không chắc mô-đun điều khiển nhạy đến mức nào với điện áp điều khiển ồn, tôi đã loại bỏ ý tưởng về PWM ủng hộ một giải pháp bất khả tri và nền tảng hơn.
Cách dễ nhất, nhanh nhất và ít tin cậy nhất để tạo ra điện áp thay đổi là thông qua việc sử dụng bộ chia điện áp. Một bộ chia điện áp không có gì khác hơn là một loạt các điện trở mà trên đó một điện áp được áp dụng. Hình 3 cho thấy một sơ đồ của dạng đơn giản nhất của một bộ chia điện áp: hai điện trở mắc nối tiếp.
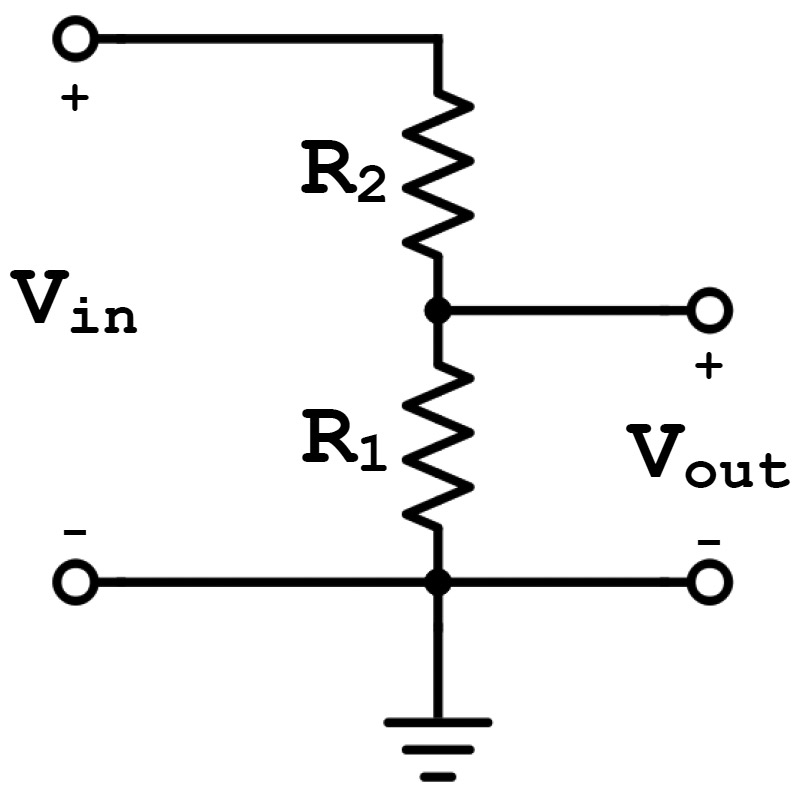
HÌNH 3. Sơ đồ một bộ chia điện áp đơn giản với hai điện trở.
Trong mạch này, điện áp đầu ra có liên quan đến điện áp đầu vào và các điện trở theo mối quan hệ:
Phương trình này được gọi là quy tắc chia điện áp. Tôi sẽ không làm bạn chán bằng cách chứng minh rằng nó hoạt động; nếu bạn có nghi ngờ, Google nó.
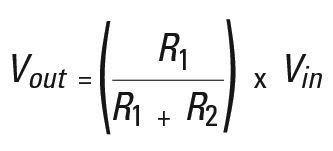
Suy nghĩ đầu tiên của tôi khi thiết kế mạch cho các đường điều khiển này là sử dụng bộ chia điện áp với hai điện trở và chiết áp (như trong Hình 4 ) để tạo ra phạm vi 5-7V cần thiết cho mỗi kênh. Bộ chia điện áp không cung cấp điện áp ổn định khi chúng được tải xuống (như trường hợp - ví dụ - tôi sẽ cố lái một động cơ DC giữa điện áp đầu ra từ mạch này và mặt đất), nhưng nếu chúng được sử dụng để cung cấp điện áp cho đầu vào trở kháng cao (mà tôi giả sử chính xác là trường hợp của mô-đun điều khiển này), sau đó chúng đủ ổn định trong hầu hết các trường hợp. Càng xa càng tốt.
HÌNH 4. Sơ đồ của một bộ chia điện áp biến đổi phức tạp hơn một chút với ba điện trở, một trong số đó là một chiết áp. Điện áp đầu ra từ mạch này nằm trong khoảng 5-7V.
Tại thời điểm này, tôi chỉ cần tìm một chiết áp điều khiển kỹ thuật số để đặt vào mạch của Hình 4 có thể giao tiếp dễ dàng với một nền tảng kỹ thuật số. Có nhiều thiết bị ngoài kia có vẻ như sẽ phù hợp với mạch này giống như một chiết áp cơ học, nhưng tôi đã học được một cách khó khăn là các nồi kỹ thuật số không phải lúc nào cũng linh hoạt như các đối tác hữu hình của chúng.
Tôi đã chọn sử dụng Microchip MCP4251 cho mạch của mình (biểu dữ liệu có sẵn trong các bản tải xuống). MCP4251 là một chiết áp kỹ thuật số có thể điều khiển SPI hai kênh, có các loại 5, 10, 50 và 100 kW. Tất nhiên, tôi đã chọn sử dụng phiên bản 10 kW, dựa trên các giá trị kháng mà tôi đã sử dụng trong Hình 4 .
Sử dụng tấm protoboard đáng tin cậy của tôi, tôi nối dây cho bộ chia điện áp đơn giản này và tôi đã viết một số mã Arduino nhanh và bẩn để giao tiếp với chiết áp thông qua SPI và thay đổi điện áp đầu ra hình sin. Sau đó, tôi kết nối điện áp đầu ra với máy hiện sóng của mình, bật nguồn và xem màn hình. Không có chuyện gì xảy ra.
Lúc đầu, tôi cho rằng vấn đề của mình liên quan đến các lệnh SPI mà tôi đang gửi. (Tôi đã đọc sai bảng dữ liệu phải không?) Sau khi kiểm tra hai lần và ba lần, tôi quyết định rằng các lệnh sẽ hoạt động. Để kiểm tra kết luận này theo một cách khác, tôi đã ngắt kết nối bộ chia điện áp khỏi nguồn điện, đặt DMM của tôi ở chế độ điện trở và bắt đầu kiểm tra các thuộc tính điện trở của đồng hồ vạn năng kỹ thuật số.
Điện trở trên toàn bộ thiết bị được đo ở mức 10 kW. Càng xa càng tốt. Tiếp theo, tôi kiểm tra điện trở giữa cần gạt nước và một trong các đầu của nồi. Tôi thấy một biến động dao động lớn từ 0 đến 10 kW. Lúc này, tôi đã bối rối. Chiết áp hoạt động chính xác như tôi mong đợi, và điện áp đầu ra từ mạch của tôi không thay đổi khi nguồn điện được kết nối.
MCP4251 đã không đào quá nhiều vào bảng dữ liệu để phát hiện ra lỗi của tôi. Điện áp đặt vào cần gạt của các chiết áp kỹ thuật số này phải nằm giữa Vss (0V trong mạch của tôi) và Vdd + 0,3V (5,3V trong mạch của tôi). Ngược lại, tôi đã thử áp dụng 5V và 7V vào hai đầu của chiết áp.
Chuột! Đã đến lúc sửa đổi mạch ban đầu của tôi.
GIẢI PHÁP: MỘT MẠCH ĐƠN GIẢN KHÁC ĐỂ GIẢI CỨU
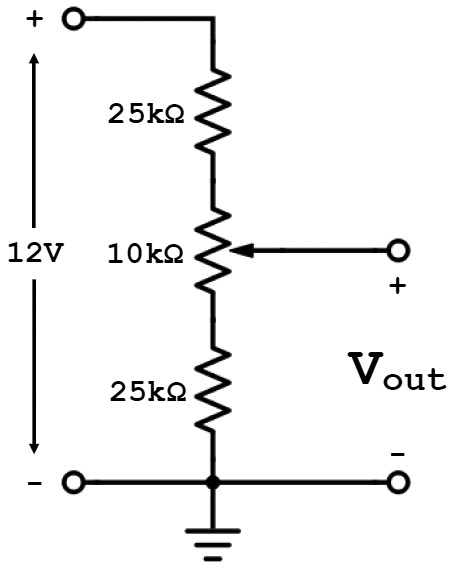
Vì tôi có thể thay đổi vị trí gạt nước của nồi kỹ thuật số của mình như mong muốn, tôi biết rằng thiết bị này vẫn có thể hữu ích trong thiết kế cuối cùng của tôi. Tôi có thể dễ dàng tạo ra một bộ chia điện áp để cung cấp điện áp đầu ra 0-2V thay đổi bằng cách áp dụng 5V trên điện trở 15 kW được kết nối nối tiếp với nồi 10 kW của tôi, như được hiển thị sơ đồ trong Hình 5 . Nguyên mẫu mạch này là một làn gió, và nó tạo ra kết quả mong muốn.
HÌNH 5. Sơ đồ bộ chia điện áp thay đổi được sử dụng trong dự án này. Điện áp đầu ra từ mạch này nằm trong khoảng 0-2V.
Khi mạch này được hoàn thành, tôi chỉ cần áp dụng bù DC DC cho đầu ra của nó, điều mà tôi biết tôi có thể làm với một mạch đơn giản khác: bộ khuếch đại tổng hợp.
Sơ đồ của bộ khuếch đại tổng hợp cơ bản được hiển thị trong Hình 6 .

HÌNH 6. Sơ đồ mạch khuếch đại tổng hợp đơn giản. Điện áp đầu ra từ mạch này tỷ lệ với tổng trọng số của điện áp đầu vào.
Điện áp đầu ra từ bộ khuếch đại này là tổng của hai điện áp đầu vào, V1 và V2, được xác định theo mối quan hệ:
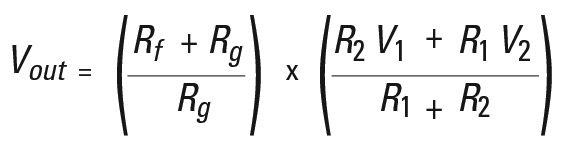
Nếu tất cả các điện trở trong mạch này bằng nhau, Vout = V1 + V2. Việc đặt bộ chia điện áp từ Hình 5 cùng với bộ khuếch đại này đã tạo ra mạch như trong Hình 7 , trong đó R1, R2, Rf và Rg từ mạch của Hình 6 đã được thay thế bằng các điện trở 10 kW. Mạch này cuối cùng tạo ra một phạm vi 5-7,7V ở đầu ra của op-amp.
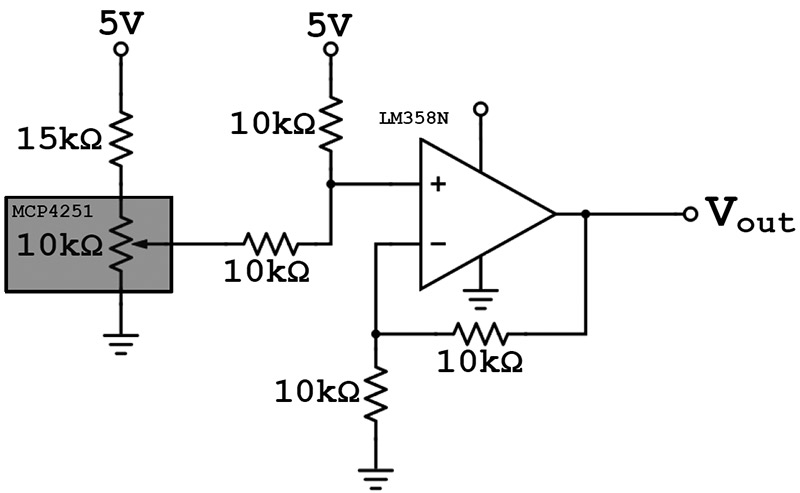
Hình 7. Sơ đồ bộ chia điện áp từ Hình 5 được tích hợp với bộ khuếch đại tổng hợp như trong Hình 6. Đây là mạch được sử dụng để điều khiển một mức độ tự do duy nhất cho robot xe lăn. Chiết áp kỹ thuật số được đóng hộp màu xám.




CỬA HÀNG PHỤ TÙNG XE ĐIỆN NHẬT MINH
Địa chỉ:Tầng 12a03 Tòa Thăng Long Victory, Khu Đô Thị Nam An Khánh, Xã An Khánh, Huyện Hoài Đức, TP Hà Nội
STK: Techcombank : 19036537710018
CTK: NGUYỄN VĂN SẾP
Chi Nhánh: HÀ NỘI
Email:xedienpro.com@gmail.com
Holine: 092.205.6686




© 2019 Chromium Theme . Designed by Wasmedia